

Arduino 串行外设接口
串行外设接口(SPI)总线是用于串行通信的系统,最多可使用四个导体,通常为三个。一个导体用于数据接收,一个导体用于数据发送,一个导体用于同步,另一个导体用于选择与之通信的设备。它是一个全双工连接,这意味着数据是同时发送和接收的。最大波特率高于I2C通信系统中的波特率。
板的SPI引脚
SPI使用以下四条线:
SCK - 这是由主机驱动的串行时钟。
MOSI - 这是由主机驱动的主输出/从输入。
MISO - 这是由主机驱动的主输入/从输出。
SS - 这是从机选择线。
使用以下函数,必须包括SPI.h.
SPI.begin() - 通过将SCK,MOSI和SS设置为输出来初始化SPI总线,将SCK和MOSI拉低,将SS拉高。
SPI.setClockDivider(分频器) - 相对于系统时钟设置SPI时钟分频器。在基于AVR的板上,可用的分频器为2,4,8,16,32,64或128。默认设置为SPI_CLOCK_DIV4,它将SPI时钟设置为系统时钟的四分之一(对于20 MHz的电路板为5 Mhz)。
Divider - 它可以是(SPI_CLOCK_DIV2,SPI_CLOCK_DIV4,SPI_CLOCK_DIV8,SPI_CLOCK_DIV16,SPI_CLOCK_DIV32,SPI_CLOCK_DIV64,SPI_CLOCK_DIV128)。
SPI.transfer(val) - SPI传输基于同时发送和接收:接收的数据在receivedVal中返回。
SPI.beginTransaction(SPISettings(speedMaximum,dataOrder,dataMode)) - speedMaximum是时钟,dataOrder(MSBFIRST或LSBFIRST),dataMode(SPI_MODE0,SPI_MODE1,SPI_MODE2或SPI_MODE3)。
SPI中有四种操作模式,如下所示:
模式0(默认值) - 时钟通常为低电平(CPOL = 0),数据在从低电平到高电平(前沿)(CPHA = 0)的转换时采样。
模式1 - 时钟通常为低电平(CPOL = 0),数据在从高电平到低电平(后沿)(CPHA = 1)的转换时采样。
模式2 - 时钟通常为高电平(CPOL = 1),数据在从高电平到低电平(前沿)(CPHA = 0)的转换时采样。
模式3 - 时钟通常为高电平(CPOL = 1),数据在从低电平到高电平(后沿)(CPHA = 1)的转换时采样。
SPI.attachInterrupt(handler) - 当从设备从主设备接收数据时调用的函数。
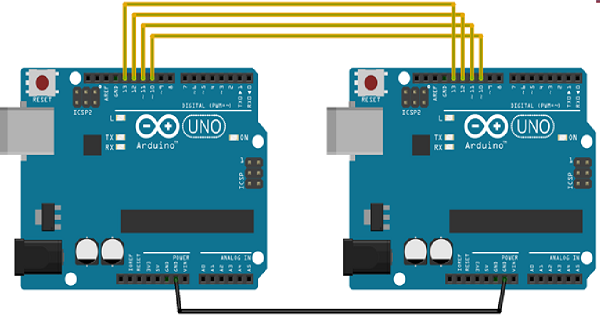
现在,我们将两个Arduino UNO板连接在一起;一个作为主机,另一个作为从机。
- (SS):引脚10
- (MOSI):引脚11
- (MISO):引脚12
- (SCK):引脚13
接地是常见的。以下是两个电路板之间的连接的图示:
让我们看看SPI作为主机和SPI作为从机的例子。
SPI为主机
例子
#include <SPI.h>
void setup (void) {
Serial.begin(115200); //set baud rate to 115200 for usart
digitalWrite(SS, HIGH); // disable Slave Select
SPI.begin ();
SPI.setClockDivider(SPI_CLOCK_DIV8);//divide the clock by 8
}
void loop (void) {
char c;
digitalWrite(SS, LOW); // enable Slave Select
// send test string
for (const char * p = "Hello, world!\r" ; c = *p; p++) {
SPI.transfer (c);
Serial.print(c);
}
digitalWrite(SS, HIGH); // disable Slave Select
delay(2000);
}SPI为从机
例子
#include <SPI.h>
char buff [50];
volatile byte indx;
volatile boolean process;
void setup (void) {
Serial.begin (115200);
pinMode(MISO, OUTPUT); // have to send on master in so it set as output
SPCR |= _BV(SPE); // turn on SPI in slave mode
indx = 0; // buffer empty
process = false;
SPI.attachInterrupt(); // turn on interrupt
}
ISR (SPI_STC_vect) // SPI interrupt routine {
byte c = SPDR; // read byte from SPI Data Register
if (indx < sizeof buff) {
buff [indx++] = c; // save data in the next index in the array buff
if (c == '\r') //check for the end of the word
process = true;
}
}
void loop (void) {
if (process) {
process = false; //reset the process
Serial.println (buff); //print the array on serial monitor
indx= 0; //reset button to zero
}
}