
工业机器人的编程通常依赖于特定的编程语言和软件,这些是由机器人制造商提供的,以适应各自机器人控制系统的特点。以下是一些常见的工业机器人编程语言和软件:
工业机器人编程语言:  1. RAPID:ABB机器人使用的编程语言,具有类似C语言的语法结构,专门用于控制机器人的运动和操作。
1. RAPID:ABB机器人使用的编程语言,具有类似C语言的语法结构,专门用于控制机器人的运动和操作。
2. KRL(KUKA Robot Language):KUKA机器人使用的编程语言,同样具有C语言风格,用于控制机器人的各种功能。
3. Karel:FANUC机器人使用的编程语言,也是基于C语言的,用于编写机器人的控制程序。
4. Motoman YAES:用于Yaskawa Motoman机器人的编程语言,提供了丰富的指令集用于控制机器人的运动和序列。
5. PLC编程语言:一些工业机器人可以通过PLC(可编程逻辑控制器)进行编程,常见的PLC编程语言包括梯形图、功能块图和指令列表等。
工业机器人编程软件: 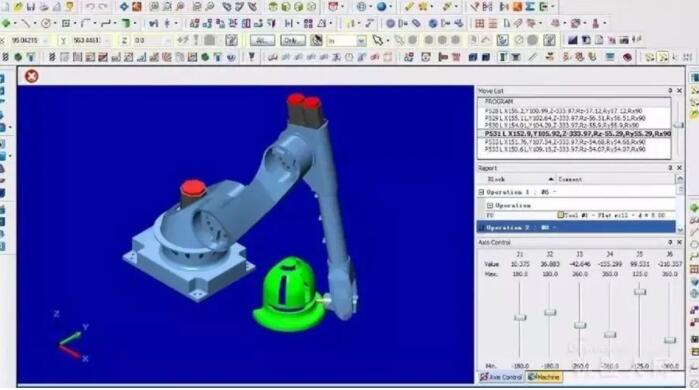 1. RobotStudio:ABB提供的离线仿真和编程软件,可以在计算机上模拟机器人的操作,并生成可以在机器人控制器上运行的代码。
1. RobotStudio:ABB提供的离线仿真和编程软件,可以在计算机上模拟机器人的操作,并生成可以在机器人控制器上运行的代码。
2. KUKA.OfficeLite:KUKA提供的编程和仿真软件,允许用户在计算机上创建和测试机器人程序。
3. FANUC robots DP/NC Guide:FANUC提供的集成开发环境,用于编写、调试和验证机器人程序。
4. IGRIP:一种离线机器人编程和仿真软件,支持多种机器人品牌的模拟,适用于虚拟现实中的机器人仿真应用。
5. RobotMaster:一种适用于多种机器人品牌的离线编程软件,可以直接在Mastercam软件中集成机器人编程功能。
6. RoboDK:一款适用于多种机器人品牌的离线编程和仿真软件,提供用户友好的界面和强大的功能。
使用这些软件,工程师可以在机器人停止工作的情况下进行编程,或者利用离线编程在机器人继续生产的同时为下一个任务准备程序。离线编程可以大幅提高生产效率,减少停机时间。
工业机器人编程通常要求对机器人的运动学、动力学以及具体的应用场景有深入的理解。因此,除了掌握编程语言和软件工具之外,工程师还需要具备相关的工程背景知识。
工业机器人编程语言:
2. KRL(KUKA Robot Language):KUKA机器人使用的编程语言,同样具有C语言风格,用于控制机器人的各种功能。
3. Karel:FANUC机器人使用的编程语言,也是基于C语言的,用于编写机器人的控制程序。
4. Motoman YAES:用于Yaskawa Motoman机器人的编程语言,提供了丰富的指令集用于控制机器人的运动和序列。
5. PLC编程语言:一些工业机器人可以通过PLC(可编程逻辑控制器)进行编程,常见的PLC编程语言包括梯形图、功能块图和指令列表等。
工业机器人编程软件:
2. KUKA.OfficeLite:KUKA提供的编程和仿真软件,允许用户在计算机上创建和测试机器人程序。
3. FANUC robots DP/NC Guide:FANUC提供的集成开发环境,用于编写、调试和验证机器人程序。
4. IGRIP:一种离线机器人编程和仿真软件,支持多种机器人品牌的模拟,适用于虚拟现实中的机器人仿真应用。
5. RobotMaster:一种适用于多种机器人品牌的离线编程软件,可以直接在Mastercam软件中集成机器人编程功能。
6. RoboDK:一款适用于多种机器人品牌的离线编程和仿真软件,提供用户友好的界面和强大的功能。
使用这些软件,工程师可以在机器人停止工作的情况下进行编程,或者利用离线编程在机器人继续生产的同时为下一个任务准备程序。离线编程可以大幅提高生产效率,减少停机时间。
工业机器人编程通常要求对机器人的运动学、动力学以及具体的应用场景有深入的理解。因此,除了掌握编程语言和软件工具之外,工程师还需要具备相关的工程背景知识。

